Robótica com Android e Arduino
Nesse artigo, pretendo descrever o processo de criação de um robô baseado na plataforma Arduino e integrado ao Android, através da camada de script SL4A.
[ Hits: 91.094 ]
Por: João Victor em 16/04/2014

Montagem do robô
Os componentes do robô foram todos comprados pela Internet, o preço de cada componente varia entre R$ 10,00 a R$ 25,00. O único que foge a essa faixa, é o Arduino que custou cerca de R$ 50,00. Na imagem abaixo, podemos observar todos os componentes usados:

Sensor ultrassônico HC-SR04, Ponte-H LN298, Módulo Bluetooth HC-06, Arduino UNO R3 e Micro-servo 9g
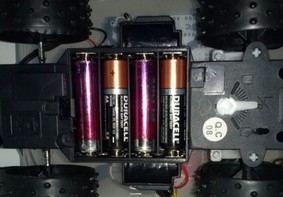
Para montagem do robô, utilizarei o chassi do carrinho de controle remoto como base. Podemos observar os dois motores e uma chave ON/OFF que controla a alimentação feita através de 4 pilhas AA, fixadas no próprio suporte do carrinho. O motor de trás impulsiona o robô, enquanto o da frente, faz com que ele vire para esquerda e direita.
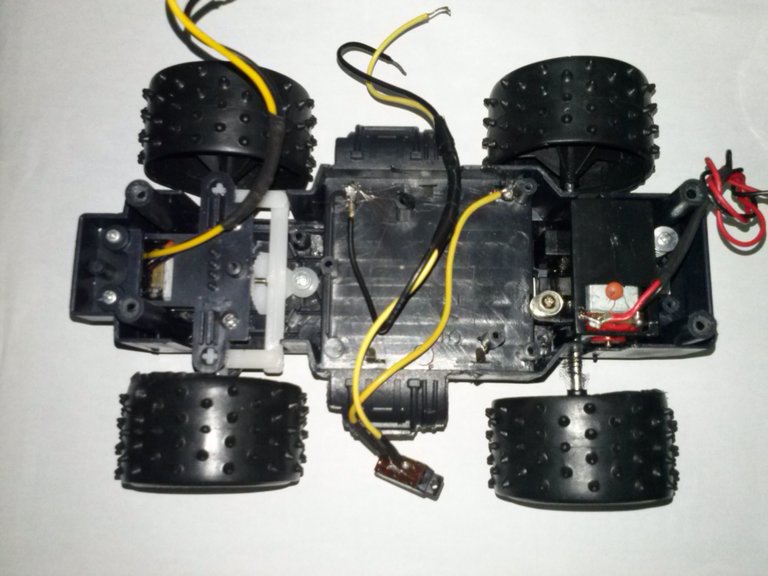
Para impulsionar o robô, o motor traseiro possui uma caixa de redução, uma série de engrenagens, que fazem com que o a rotação, que é transmitida do motor para as rodas, seja baixa, porém, que tenha força.
Uma dica para escolher um carrinho, é girar suas rodas com as mãos, quanto mais força for necessária para girar as rodas, maior será a força que será transmitida para as rodas quando o motor estiver funcionando, porém, menor será a velocidade.
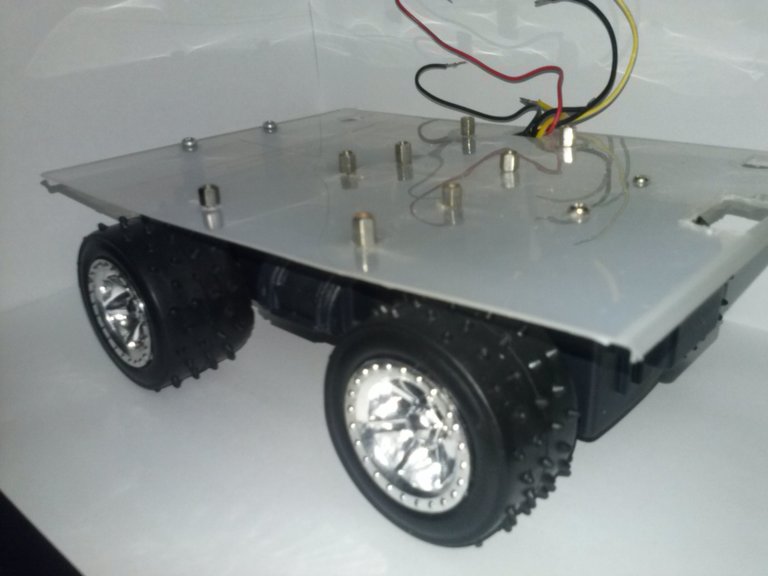
Para o suporte dos módulos, será utilizada uma placa plástica perfurada. Os módulos podem ser parafusados diretamente na placa plástica, porém, recomendo o uso de espaçadores usados para fixação da placa-mãe ao gabinete de computadores, facilmente encontrados em sucatas. Para perfurar a placa, utilizei uma minifuradeira, mas, poderíamos usar uma furadeira comum.
Ao posicionarmos os módulos sobre a placa, devemos manter um certo alinhamento que mantenha o peso dividido de maneira correta, caso o peso seja direcionado apenas para um lado, o robô ficará "puxando" para esse lado, como um carro desalinhado, os componentes mais pesados do robô devem ficar na parte traseira, para que o atrito com o piso seja maior impulsionando o robô com mais força.
Depois de fixarmos os espaçadores, basta apenas parafusar o Arduino e a Ponte-H.
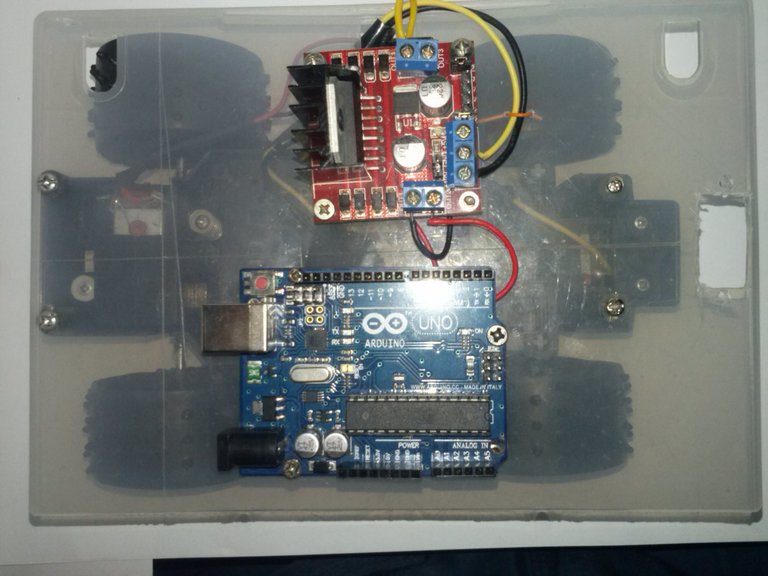
Na parte superior, vemos o circuito Ponte-H L298N, responsável pelo controle da velocidade e sentido dos motores. O módulo possui duas conexões para os motores e uma conexão para alimentação.
O uso desse módulo é necessário, devido à corrente que os motores exigem, ser maior da que o Arduino fornece, o circuito funciona controlando a tensão que chega ao motores, sendo capaz de inverter a rotação invertendo a tensão.
Se pegarmos uma pilha e conectar seus terminais a um motor, esse girará em um sentido. Se invertemos, como os terminais estão ligados, o motor inverterá seu sentido de rotação. Isso acontece, porque a energia elétrica tende a fluir do terminal positivo ao negativo. O circuito da Ponte-H faz essa inversão internamente, através de uma série de transistores (interruptores).
Para que o robô possa desviar de obstáculos, utilizei um sensor ultrassônico que dispara um pulso e verifica quanto tempo ele leva para retornar, calculando assim, a distância em que um objeto se encontra do robô. Para movimentação do sensor, utilizarei um servo motor e uma peça plástica.

O Servo é um motor com uma caixa de redução. Em seu eixo, é fixado um potenciômetro que indica em que posição o motor se encontra, o grande diferencial de um servo motor e um motor comum, é que o Servo não é capaz de realizar um giro completo, porém, podemos definir qual posição o Servo se encontra, controlando o movimento do sensor em um raio de 180 graus.
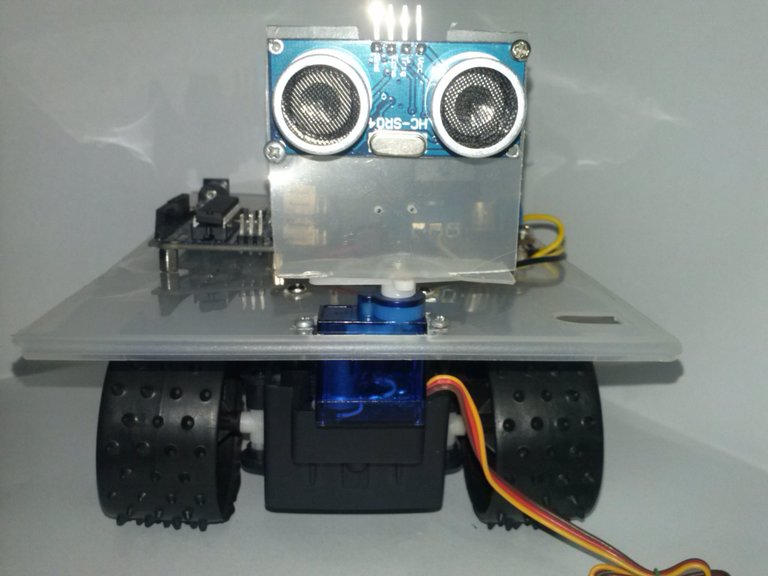
O Servo também será conectado à alimentação dos motores, visto que somente a alimentação do Arduino não é capaz de movimentá-lo. A montagem do sensor e do servo deve ficar bem centralizada, de maneira que o sensor esteja totalmente virado para frente, quando o servo estiver a 90°.
Para comunicação com o robô, utilizaremos um módulo Bluetooth conectado ao Arduino. Para servir como suporte, conectei o módulo diretamente ao Arduino. A facilidade de trabalhar com Bluetooth no Arduino é surpreendente, com pouquíssimas linhas de código, podemos fazer a comunicação com diversos dispositivos.
Com todos os componentes no lugar, devemos conectar tudo ao Arduino. O diagrama seguinte, ilustra como as conexões devem ser feitas.
* Lembrando que o circuito da Ponte H do diagrama, não é o mesmo que o usado no robô, porém, possui as mesmas conexões, para fazer as conexões foram utilizados vários jumpers.
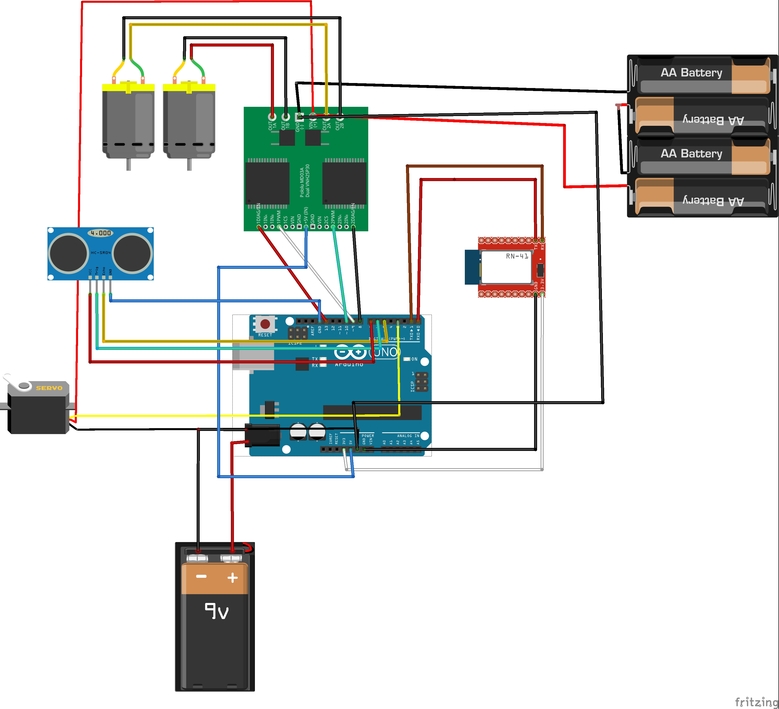
Com tudo conectado, o robô já pode ser ligado. Ao final, ele ficou até charmoso. Para alimentar o Arduino, utilizamos uma bateria de 9V.

2. Montagem do robô
3. Programando
4. Bluetooth
5. Integrando recursos
6. Aplicação de controle
7. Conclusão
Python com SL4A - A camada de script do Android
Clicador automático de Tinder com Python
Como gerar qualquer emoji ou símbolo unicode a partir do seu teclado
Convertendo Texto em Fala com Python e pyttsx3
RapidScan - Multi-Tool WEB Vulnerability Scanner
Excelente! Parabéns pelo artigo e pela paciência. Por várias vezes pensei em fazer um artigo semelhante e sei bem o trabalho que dá.
Já está nos meus favoritos.
Muito interessante.
Artigo muito bem explicado e de fácil entendimento.
10!
Muito obrigado a todos, o trabalho é recompensado quando o artigo consegue compartilhar a idéia pelo qual foi feito.
Excelente artigo e como já disseram está muito bem explicado, qualquer pessoa vai conseguir fazer esse robô!
excelente artigo favoritado pra projetos futuros
Realmente, nota 10 mesmo ! Cheguei até a estudar um orçamento e ligar em umas lojas para ver uns orçamentos, e realmente não é tão caro ! Vou tentar montar um dia, e independente do resultado, posto aqui ! Vlw !
Patrocínio

Destaques
Artigos
O Editor de Texto Nano: Simplicidade no Terminal
SynapSeq - programa para estimular as ondas cerebrais
Por que seu __DIR__ falhou ou o "inferno" dos caminhos no PHP
Preparando-se para certificações da LPI através do LPI Lab
Migração de Arch Linux para repositórios CachyOS (Uso de Instruções v3 e v4)
Dicas
Jogando "Magic" gratuitamente no Linux
Zoxide e fzf no bash para incrementar o uso do Terminal
As diferencas entre o clipboard comum e a selecao ativa
Arch Linux com repos do CachyOS para otimização ou usar Gentoo?
Tópicos
Eu aprendi o segredo das artes! hahaha (4)
A falsa sensação de que entende a tal da palavra! (0)
Como instalo o Clipper/Harbour no Linux Ubuntu (0)
Top 10 do mês
-

Xerxes
1° lugar - 140.581 pts -

Fábio Berbert de Paula
2° lugar - 71.384 pts -

Buckminster
3° lugar - 47.520 pts -

Alberto Federman Neto.
4° lugar - 37.873 pts -

Alessandro de Oliveira Faria (A.K.A. CABELO)
5° lugar - 25.089 pts -

edps
6° lugar - 24.240 pts -

Sidnei Serra
7° lugar - 23.552 pts -

Daniel Lara Souza
8° lugar - 22.941 pts -

Mauricio Ferrari (LinuxProativo)
9° lugar - 21.470 pts -

Andre (pinduvoz)
10° lugar - 17.989 pts
Scripts
A maior comunidade GNU/Linux da América Latina! Artigos, dicas, tutoriais, fórum, scripts e muito mais. Ideal para quem busca auto-ajuda.
Site hospedado por: